


 當(dāng)前位置:首頁 >> 產(chǎn)品展示 >> 桁架機(jī)器人
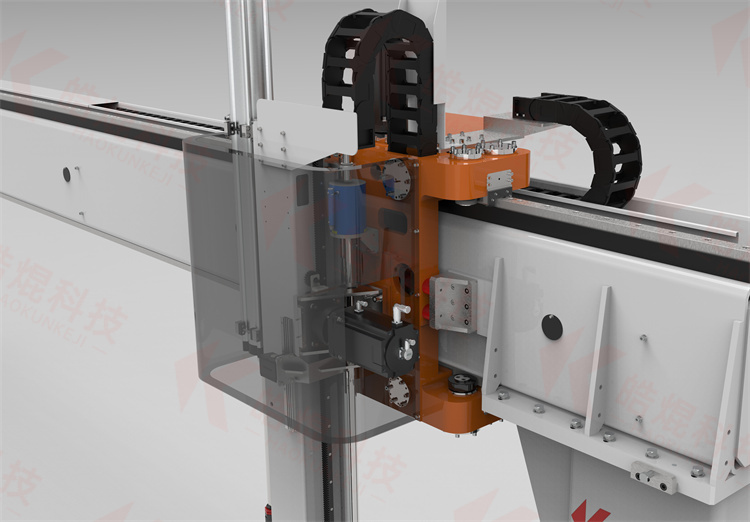
當(dāng)前位置:首頁 >> 產(chǎn)品展示 >> 桁架機(jī)器人 桁架機(jī)器人由多維機(jī)器人行走軸搭建而成。各機(jī)器人行走軸由型鋼焊接而成,滾輪直線導(dǎo)軌和齒輪齒條及伺服電機(jī)等組成。作為運(yùn)動(dòng)框架和載體的型鋼其截面形狀通過有限元分析法來優(yōu)化設(shè)計(jì),生產(chǎn)中的精益求精確保其強(qiáng)度和直線度,采用滾輪距型導(dǎo)軌作為運(yùn)動(dòng)導(dǎo)軌,運(yùn)動(dòng)傳動(dòng)機(jī)構(gòu)采用減速機(jī)和齒輪齒條或滾珠絲杠。
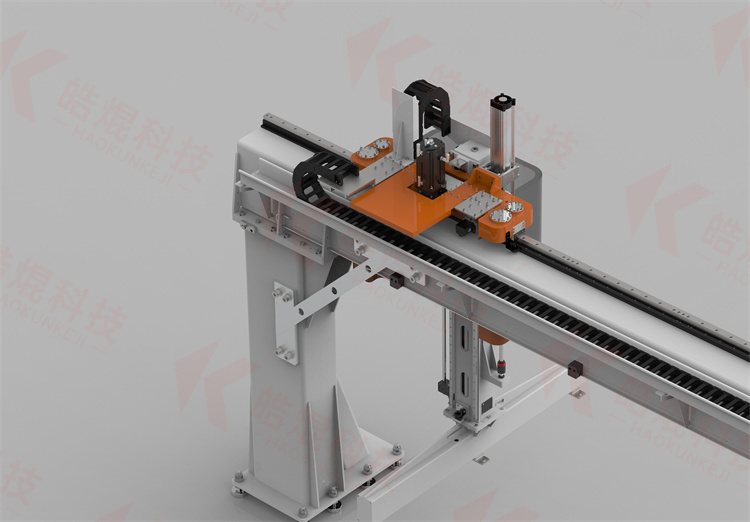
桁架機(jī)器人的空間運(yùn)動(dòng)是用三個(gè)相互垂直的直線運(yùn)動(dòng)來實(shí)現(xiàn)的。由于直線運(yùn)動(dòng)易于實(shí)現(xiàn)全封閉的位置控制。所以,桁架式機(jī)器人有可能達(dá)到較高的位置精度。為了實(shí)現(xiàn)一定的運(yùn)動(dòng)空間,桁架式機(jī)器人的結(jié)構(gòu)尺寸要比其他類型的機(jī)器人的結(jié)構(gòu)尺寸大得多,桁架式機(jī)器人的工作空間為一空間長方體。
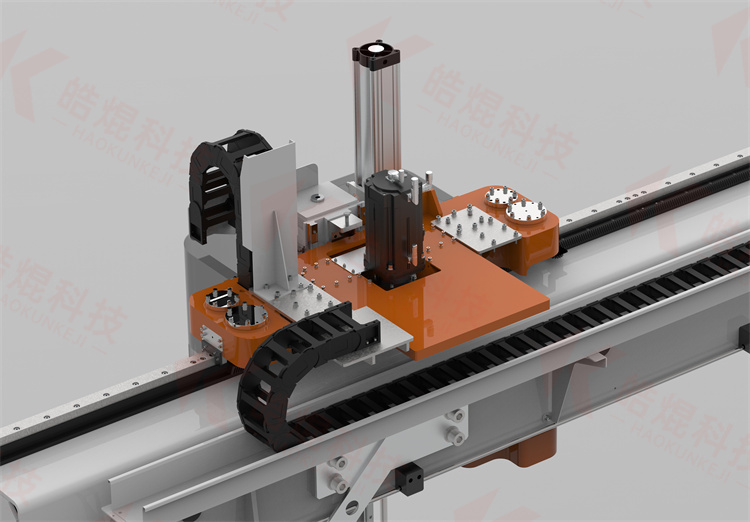
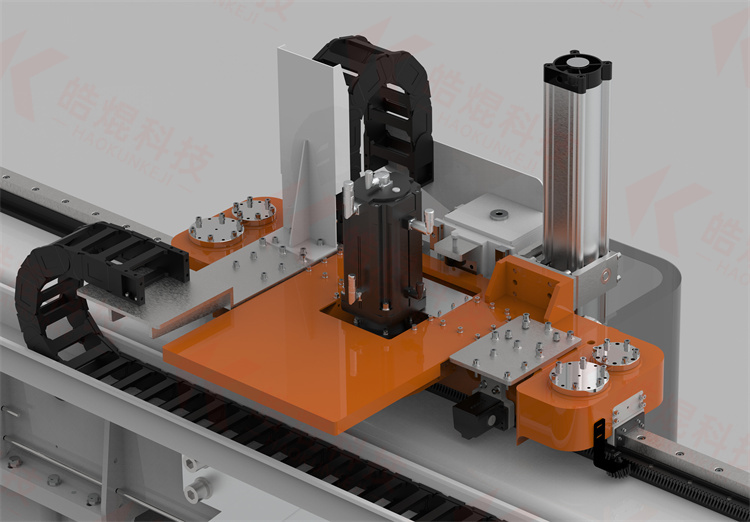
矩形導(dǎo)軌及硬質(zhì)滾輪組合具有較高的承載能力,*高運(yùn)行速度為4米/秒,具有軸向承載能力的硬質(zhì)滾輪使系統(tǒng)能夠承受軸向和徑向的沖擊力和意外損壞。它易于安裝在任何長度的第七軸,并可提供長時(shí)間和無故障的使用壽命。
滑臺上的每個(gè)軸承輪可以很容易地拆下,方便裝配到軌道上。這種獨(dú)特的功能大大降低了安裝和維護(hù)的難度。





南京皓焜自動(dòng)化科技有限公司
 地址:江蘇省南京市溧水區(qū)七里甸路5號
地址:江蘇省南京市溧水區(qū)七里甸路5號
 手機(jī):13338056278
手機(jī):13338056278
 電話:025-57209908
電話:025-57209908
 QQ:
QQ:
 微信:haokun_fmf
微信:haokun_fmf
